
Průmyslový počítač TEMPO (všechny vyráběné varianty TEMPO 01 až TEMPO 04) je vybaven čtyřmi pozicemi pro periferní submoduly (vyvedené na konektory A až D – značené CH1 až CH4), rozhraními USB (2x USB master a 1x USB slave) a rozhraním ETHERNET 10/100. Následující obrázek zobrazuje rozložení konektorů počítače TEMPO (pohled zezadu) a umístění pozic pro submoduly.
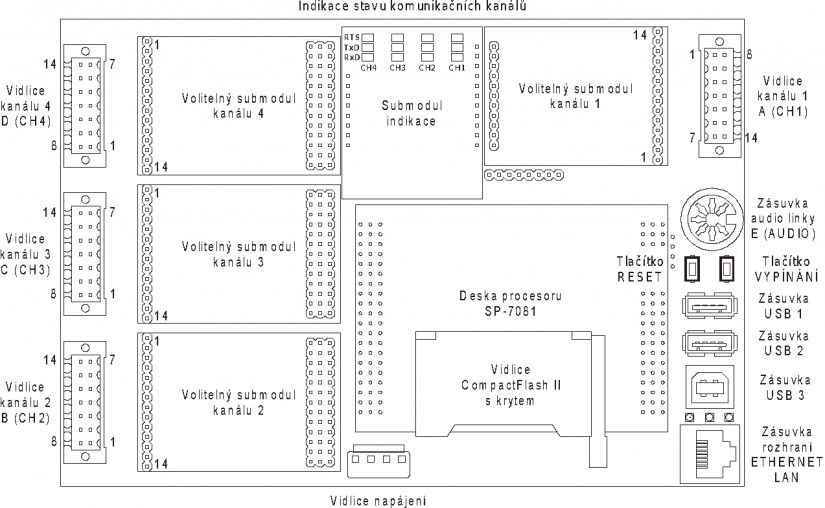
Obr. 1 Rozložení pozic pro submoduly komunikačních kanálů a připojovacích konektorů.
Tab.1 Charakteristika komunikačních kanálů
|
Označení kanálu |
Charakteristika |
||
|
asynchronní sériový kanál |
synchronní sériový kanál |
paralelní kanál |
|
| CH4 |
ne |
ano |
ano |
| CH3 |
ano |
ne |
ano |
| CH2 |
ano |
ne |
ano |
| CH1 |
ano |
ne |
ne |
 |
U výrobních čísel 0001 až 0013 TXN 190 02 byly sériové kanály označeny na výrobku i v dokumentaci v opačném pořadí (CH4 jako CH1, CH3 jako CH2, CH2 jako CH3 a CH1 jako CH4). |
Zapojení rozhraní CH1 až CH4
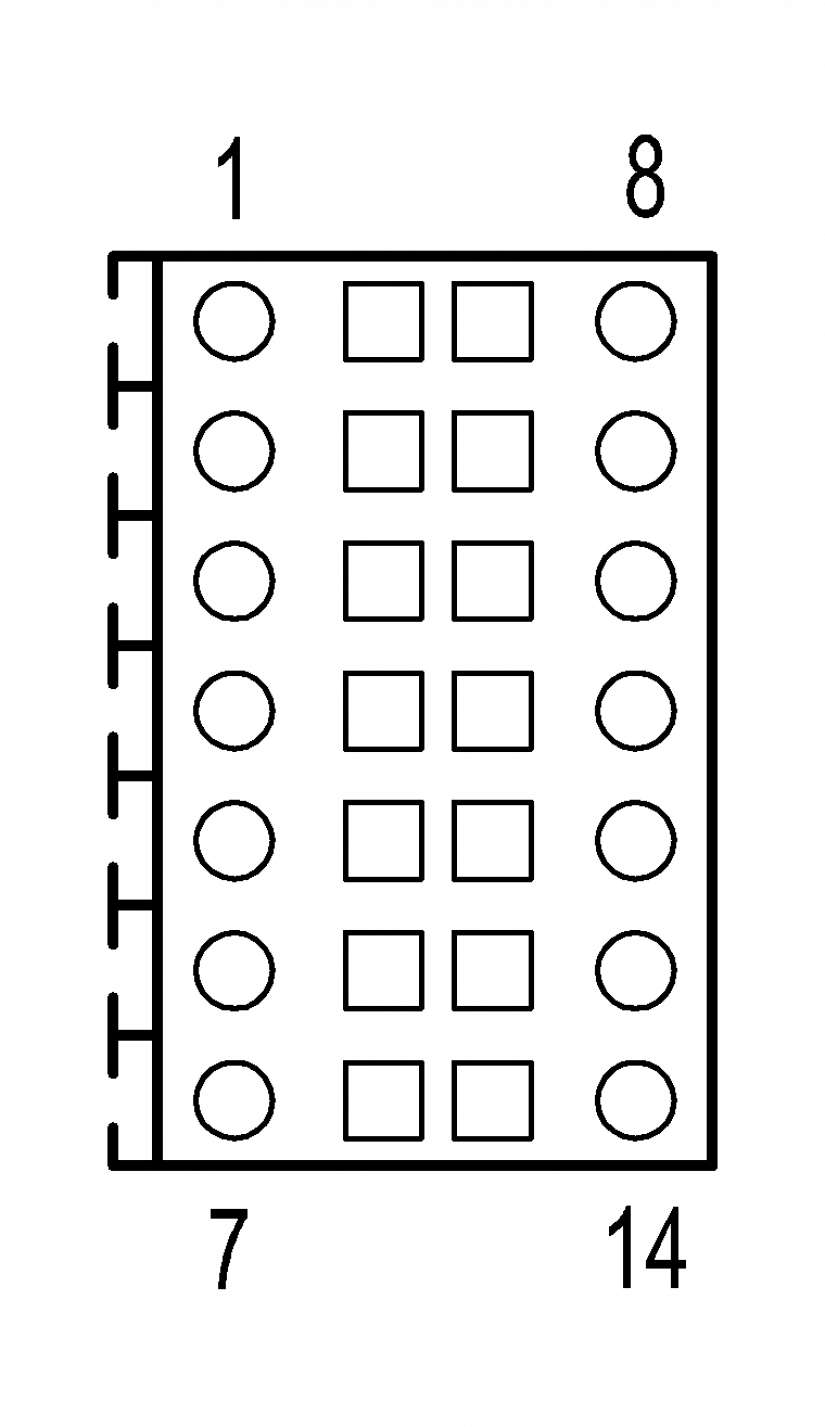
Rozhraní (pozice CH1 až CH4) jsou osazena vyjímatelnými bezšroubovými konektory. Pohled na konektor (při pohledu na systém TEMPO zezadu) je na obr. 2. Podrobnější parametry konektorů jsou uvedeny v kapitole 12.1.
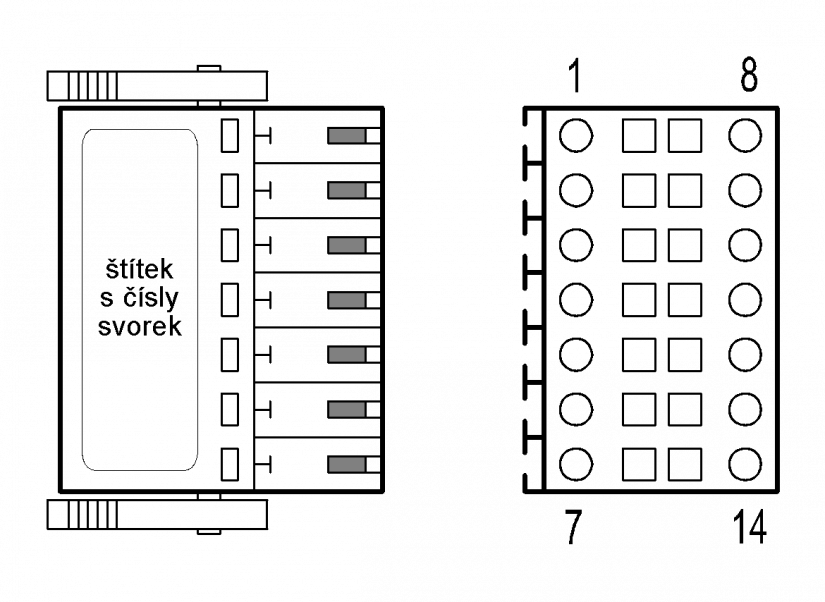
Obr. 2 Konektor A až D rozhraní průmyslového počítače TEMPO.
Pro sériové asynchronní rozhraní (pozice CH1 až CH3) popisují následující kapitoly rozmístění signálů na konektorech při použití standardních komunikačních submodulů.
MR-0102 - rozhraní RS-232, s galvanickým oddělením
Submodul MR-0102 zajišťuje převod signálů TTL sériového rozhraní na rozhraní RS232, včetně galvanického oddělení. Toto rozhraní je určené pouze k propojení dvou účastníků (zapojení bod-bod).
Tab. 1 Zapojení konektoru sériového kanálu při osazeném submodulu MR-0102
| Konektor A (B, C) |
Vývod |
Signál |
Typ signálu |
Užití |
|
|
6 |
GND |
signálová zem |
|
|
7 |
+5 V |
napájení |
Výstup z modulu |
|
|
8 |
TxD |
výstup |
datový signál |
|
|
9 |
RxD |
vstup |
datový signál |
|
|
10 |
CTS |
vstup |
řídicí signál 1) |
|
|
11 |
RTS |
výstup |
řídicí signál 1) |
|
|
13 |
GND |
signálová zem |
1) Použití signálu je popsáno v příručce Sériová komunikace programovatelných automatů Tecomat TXV 001 06. Klidová úroveň signálu odpovídá hodnotě logická 1.
MR-0112, MR-0113 - rozhraní RS-485, s galvanickým oddělením
Submodul MR-0112 nebo MR-0113 zajišťuje převod signálů TTL sériového rozhraní na rozhraní RS-485 galvanicky oddělené. Toto rozhraní pracuje v poloduplexním režimu a umožňuje vícebodové (multidrop) propojení účastníků. Pro správnou funkci je třeba správné zakončení komunikační linky (viz dále). Galvanické oddělení sériového rozhraní zajišťuje vestavěný měnič a není třeba externí napájení. U submodulu MR-0113 musí být spojené propojky zakončení – viz dokumentace k submodulu.
Tab. 2 Zapojení konektoru A sériového kanálu při osazeném submodulu MR-0112, MR-0113 (platí stejně i pro konektor B a C)
|
Konektor A (B, C) |
Svorka |
Signál |
Typ signálu |
Užití |
|
|
1,3 |
TxRx+ |
+ vstup/výstup RS-485 |
datový signál |
|
4 |
BT+ |
+ výstup zakončení |
zakončení sběrnice RS-485 |
|
|
5 |
BT– |
– výstup zakončení |
zakončení sběrnice RS-485 |
|
|
6 |
GND |
Napájení |
signálová zem |
|
|
7 |
+ 5 V |
Napájení |
Výstup napětí |
|
|
8, 10 |
TxRx– |
– vstup/výstup RS-485 |
datový signál |
|
|
11 |
BT– |
– výstup zakončení |
zakončení sběrnice RS-485 |
MR-0122 - rozhraní RS-422, s galvanickým oddělením
Submodul MR-0122 zajišťuje převod signálů TTL sériového rozhraní na rozhraní RS-422 galvanicky odděleném. Rozhraní umožňuje spojení dvou spolupracujících zařízení (bod-bod). V odůvodněných případech (např. zapojení panelů řady ID-0x) lze pomocí pájecích propojovacích bodů zapojit ovládání vysílacích a přijímacích zesilovač (viz dokumentace) a použít toto rozhraní ve sběrnicovém uspořádání monomaster.
Každé jednotlivé vedení (RxD i TxD) musí být zakončeno na konci vedení zakončovacími odpory.
Tab. 3 Zapojení konektoru A sériového kanálu při osazeném submodulu MR-0122 (platí stejně i pro konektor B a C)
| Konektor A (B, C) |
Svorka |
Signál |
Typ signálu |
Užití |
|
|
1 |
TxD+ |
výstup |
datový signál |
|
2 |
RTS+ |
výstup |
řídicí signál 1) |
|
|
3 |
RxD+ |
vstup |
datový signál |
|
|
4 |
CTS+ |
vstup |
řídicí signál 1) |
|
|
6 |
GND |
signálová zem |
||
|
7 |
+5 V |
Výstup napájení +5V |
||
|
8 |
TxD– |
výstup |
datový signál |
|
|
9 |
RTS– |
výstup |
řídicí signál 1) |
|
|
10 |
RxD– |
vstup |
datový signál |
|
|
11 |
CTS– |
vstup |
řídicí signál 1) |
1) Použití signálu je popsáno v příručce Sériová komunikace programovatelných automatů Tecomat TXV 001 06. Klidová úroveň signálu odpovídá hodnotě logická 1.
Pro jiná rozhraní je možné odvodit vyvedení signálů rozhraní na vidlice A (CH1), B (CH2), C (CH3), D (CH4) z průvodní dokumentace rozhraní a následujícího obrázku.
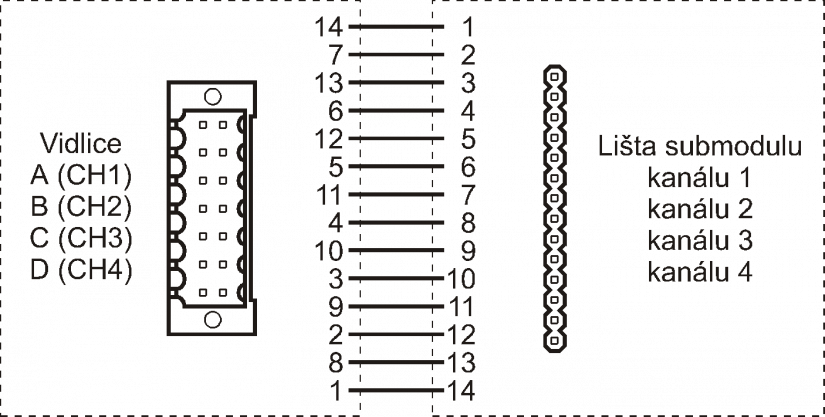
Obr. 3 Schéma propojení jednořadé kolíkové lišty pozice submodulu s výstupní vidlicí.
Rozhraní USB TEMPO
Průmyslový počítač TEMPO je standardně osazen rozhraními 2x USB master (konektory USB1 a USB2) a 1x USB slave (konektor USB3). Rozhraní NEJSOU galvanicky oddělené od vnitřních obvodů systému TEMPO, na což je nutné brát zřetel v případě použití galvanicky neoddělených submodulů v pozicích CH1 až CH4.
Konektory USB1 a USB2 odpovídají specifikaci USB, „A“ zařízení. Konektor USB3 odpovídá specifikaci USB, „B“ zařízení.
Pro připojení TEMPO k PC lze použít standardní USB A – B kabel, délky max. 5 m, kroucený a stíněný. Doporučený kabel KB-0208 je dodáván pod objednacím číslem TXN 102 08.
Tab. Technické parametry rozhraní USB
| Maximální přenosová rychlost
Maximální délka linky Galvanické oddělení od obvodů TEMPO |
1,2 MBd
5 m 1) není |
1) Maximální délka platí pro kroucený a stíněný kabel.
Rozhraní ETHERNET TEMPO (rozhraní, kabely)
Průmyslový počítač TEMPO je standardně osazen rozhraním Ethernet, 10/100 Mbit, konektor RJ-45 (označení konektoru - LAN), podrobné údaje viz kap. 3.10.3.1.
Zapojení kabelů je uvedeno v kapitole 3.10.3.2, doporučené kabely jsou uvedeny v kapitole 3.10.3.3.
Zásady instalace rozvodů ETHERNET a příklady a zásady zapojení jsou uvedeny v kapitolách 3.10.5 a 3.10.6. Z hlediska rozhraní se TEMPO chová na síti stejně jako TC700, počítač PC apod.