
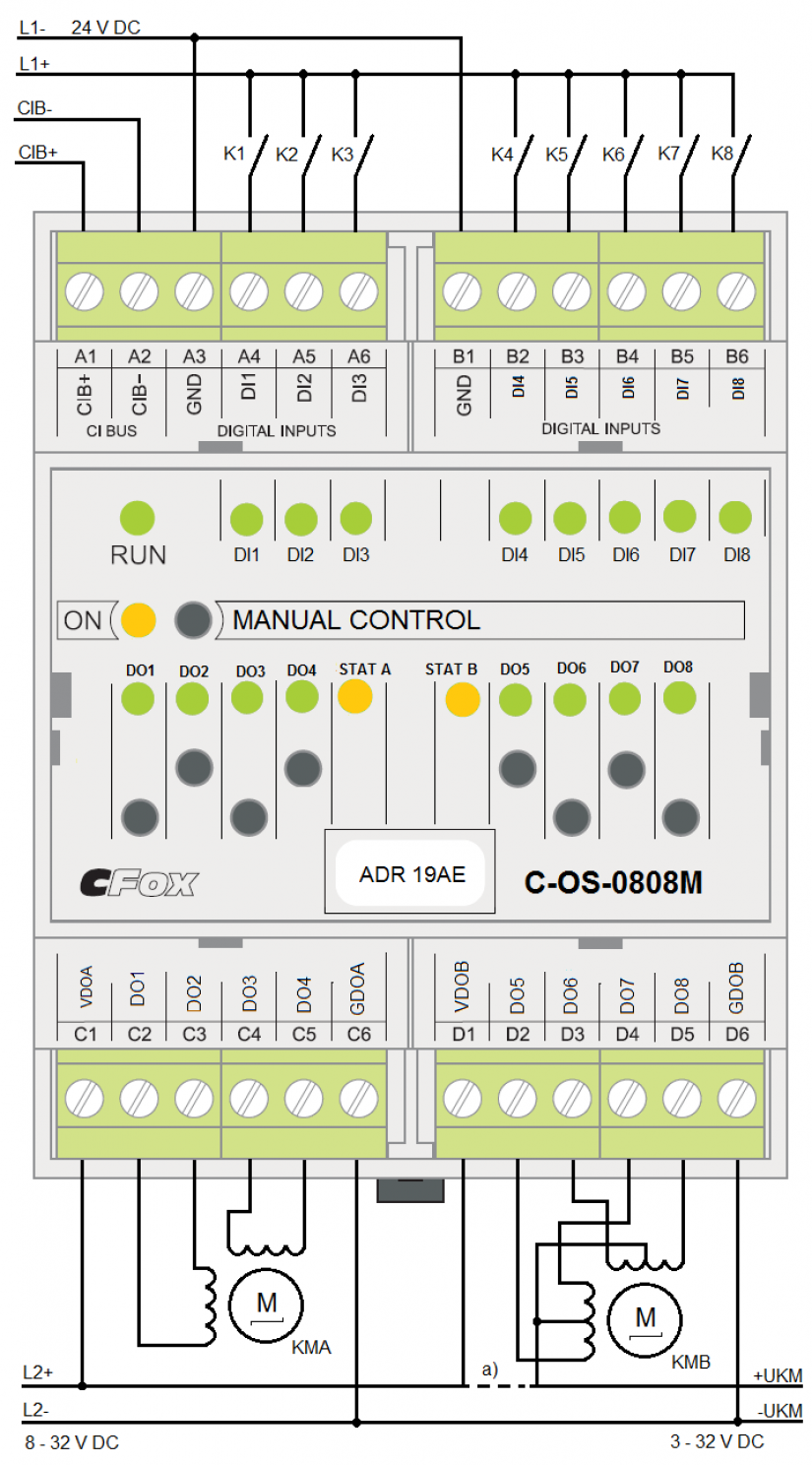
Modul obsahuje 8 binárních vstupů a 8 tranzistorových výstupů. Výstupy jsou primárně určeny pro přímé řízení až dvou krokových motorů. Variantně lze tranzistorové výstupy použít i jako běžné binární výstupy, případně je možno na výstupech aktivovat výstupní pulzně šířkovou modulaci (PWM).
Stavy jednotlivých vstupů/výstupů jsou signalizovány indikačními LED.
Jednotlivé výstupy umožňují lokální manuální ovládání tlačítky na modulu.
|
Binární vstupy |
|
| Počet | 8 (ve skupině 3+5) |
| Vstupní napětí pro log.0 | -5 ÷ +5 VDC |
| Vstupní napětí pro log.1 | +15 ÷ +30 VDC |
| Vstupní proud při log.1 | 5 mA (při 24V) |
| Zpoždění sepnutí/rozep. | 5ms |
|
Binární výstupy |
|
| Počet | 8 (ve skupině 4+4) |
| Funkce výstupů1) | 8x binární výstup / 2x řízení krokového motoru / 8x PWM výstup3) |
| Režim provozu2) | bipolární / unipolární |
| Spínané napětí | 8 ÷ 32 VDC (viz. napětí L2 v obrázku) |
| Spínaný proud výstupu | max. 2A |
| Spínaný proud skupiny | < 6A (při teplotě okolí 25°C)
< 4A (při teplotě okolí 50°C) |
| Bipolární režim
- typ výstupního prvku - zbytkový proud - doba sepnutí/rozepnutí - ochrana proti zkratu |
(viz. zapojení KMA v obrázku)
poloviční H můstek max. 2mA typ. 1,6 / 0,6 us ano |
| Unipolární režim
- typ výstupního prvku - zbytkový proud - doba sepnutí/rozepnutí - ochrana proti zkratu - napětí pro vinutí krok. motoru |
(viz. zapojení KMB v obrázku)
otevřený kolektor max. 0,1mA typ. 20 / 20 us ne 3 ÷ 32 VDC (viz. napětí UKM v obrázku) |
|
Provozní a instalační podmínky |
|
| Pracovní teplota | -10 ÷ +55 °C |
| Skladovací teplota | -25 ÷ +70 °C |
| Stupeň krytí IP IEC 529 | IP20B |
| Kategorie přepětí | II (dleČSN EN 60664) |
| Stupeň znečištění | 1 (dle ČSN EN 60664) |
| Pracovní poloha | Svislá |
| Instalace | Na DIN lištu |
| Připojovací svorky | Šroubové, vyjimatelné |
| Průřez vodičů | Max. 2,5 mm2 |
|
1) možné kombinace funkcí viz. kapitola Konfigurace 2) výstupy ve funkci DO jsou pevně nastavené do unipolárního režimu, výstupy ve funkci krokových motorů a PWM výstupů mají režim konfiguračně volitelný, V rámci jedné skupiny výstupů (4+4) musí být režim shodný pro všechny výstupy. 3) 8 PWM výstupů je podporováno od FW v.1.2 (ve skupinách 2+2+4). Pro nižší verze FW modul podporuje jen 2 PWM výstupy |
|
|
Napájení |
|
| Napájení a komunikace | 24 V (27 V) ze sběrnice CIB |
| Max. odběr | 85 mA |
|
Rozměry a hmotnost |
|
| Rozměry | 70 x 90 x 63 mm |
| Hmotnost | 142 g |
Konfigurace krokových servopohonů
Režim řízení
Řízení krokového servopohonu může probíhat v několika režimech. Stavy výstupů jsou popsány v následujících tabulkách.
- unipolární jednofázové řízení s plným krokem
- unipolární dvoufázové řízení s plným krokem
- unipolární řízení s polovičním krokem
- bipolární jednofázové řízení s plným krokem
- bipolární dvoufázové řízení s plným krokem
- bipolární řízení s polovičním krokem
Nastavení výstupů pro unipolární jednofázové řízení s plným krokem (režim 16)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
Nastavení výstupů pro unipolární dvoufázové řízení s plným krokem (režim 20)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
Nastavení výstupů pro unipolární řízení s polovičním krokem (režim 32)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 1 |
Nastavení výstupů pro bipolární jednofázové řízení s plným krokem (režim 17)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | + | – | – | – |
| 2 | – | + | - | – |
| 3 | – | - | + | – |
| 4 | – | – | – | + |
Nastavení výstupů pro bipolární dvoufázové řízení s plným krokem (režim 21)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | + | + | - | – |
| 2 | – | + | + | – |
| 3 | – | - | + | + |
| 4 | + | – | – | + |
Nastavení výstupů pro bipolární řízení s polovičním krokem (režim 33)
|
Krok |
Výstupy |
|||
| DO1
DO5 |
DO2
DO6 |
DO3
DO7 |
DO4
DO8 |
|
| 1 | + | – | – | – |
| 2 | + | + | - | – |
| 3 | – | + | - | – |
| 4 | – | + | + | – |
| 5 | – | - | + | – |
| 6 | – | - | + | + |
| 7 | – | – | – | + |
| 8 | + | – | – | + |
Minimální rychlost
Minimální rychlost je nejnižší rychlost, s jakou je zahajován pohyb osy při zrychlování z nulové rychlosti, nebo dokončován pohyb při brzdění osy až do zastavení. Rychlost lze nastavit v rozsahu 5 ÷ 10000 [puls/s]. Nastavenou hodnotu lze změnit příkazem (11).
Maximální rychlost
Maximální rychlost je nejvyšší povolená rychlost, jakou lze zadat jako parametr pohybového příkazu. Rychlost lze nastavit v rozsahu 5 ÷ 10000 [puls/s].
Maximální zrychlení
Maximální zrychlení je největší povolené zrychlení, jaké lze zadat jako provozní zrychlení. Tato hodnota slouží také jako výchozí hodnota provozního zrychlení. Zrychlení lze nastavit v rozsahu 5 ÷ 240 [puls/s2]. Nastavenou hodnotu provozního zrychlení lze změnit příkazem (12).
Maximální zpomalení
Maximální zpomalení je největší povolené zpomalení, jaké lze zadat jako provozní zpomalení. Tato hodnota slouží jako výchozí hodnota provozního zpomalení i maximálního zpomalení pro okamžité zastavení pohybu. Zpomalení lze nastavit v rozsahu 5 ÷ 240 [puls/s2]. Hodnoty obou těchto parametrů lze změnit nezávisle na sobě příkazem (13 a 14).
Rampy zrychlení/zpomalení pohybu
Tímto parametrem lze nastavit, zda se změny rychlosti motoru mají provádět skokově (rampy jsou neaktivní), nebo plynule podle zadaných hodnot zrychlení/zpomalení (rampy jsou aktivní). Aktivaci ramp lze změnit příkazem (9).
Konfigurace PWM výstupů
PWM výstupy jsou konfigurovatelné po skupinách (2 + 2) + 4. Nastavení periody a režimu řízení je společné pro celou skupinu, nastavení aktivity pulzu je pak volitelné pro každý výstup samostatně.
Pokud jsou některé výstupy nakonfigurované ve funkci binárních výstupů a některé ve funkci PWM výstupů, musí mít PWM výstupy nastaven unipolární režim řízení (dle binárních výstupů).
Perioda PWM výstupů
Společnou periodu PWM výstupů lze zadat v rozsahu 10 ÷ 1 000 000 [us] (100kHz ÷ 1Hz).
Režim řízení PWM výstupů
Společný režim PWM výstupů lze volit v unipolárním, nebo bipolárním režimu.
Pulz PWMn je aktivní
Pro každý PWM výstup lze samostatně nastavit, s jakou polaritou chceme vysílat pulzy. Pokud vybereme variantu v úrovni log.1, pak úroveň vlastního pulzu je log.1 a klidová úroveň je log.0. Pokud vybereme variantu v úrovni log.0, je tomu naopak.
Popis chování obsluh krokového servopohonu
Binární tranzistorové výstupy DOn lze použít pro řízení až dvou krokových servopohonů. Pohon A je řízen pomocí čtveřice výstupů DO1 ÷ DO4, pohon B je řízen pomocí čtveřice výstupů DO5 ÷ DO8. Modul posílá na každou čtveřici příslušných výstupů signály pro vinutí krokového servopohonu. Každý krokový servopohon má vlastní vstupní a výstupní datovou strukturu (MCA, MCB), která je popsána v předchozí kapitole.
Výstupy použité pro řízení krokového servopohonu nelze současně ovládat jako běžné DO výstupy, ani jako PWM výstupy.
Pohyb osy krokového motoru
Krokový motor je řízen pomocí čtveřice signálů, do kterých je generována příslušná sekvence výstupních pulzů. Počet generovaných pulzů určuje polohu osy, frekvence pulzů pak určuje rychlost pohybu. Každý pohyb s určenou dráhou má zpravidla tři fáze.
První fází je pohyb rovnoměrně zrychlený. Osa, která je v klidu, zahájí pohyb skokově minimální rychlostí pohybu (parametr zadaný uživatelem v konfiguraci nebo příkazem) a dále rovnoměrně zvyšuje rychlost pohybu zadaným zrychlením, až dosáhne požadovanou rychlost pohybu.
Druhou fázi tvoří rovnoměrný pohyb ustálenou rychlostí, která odpovídá požadované rychlosti pohybu.
Třetí fází je pohyb rovnoměrně zpomalený. Osa rovnoměrně snižuje rychlost pohybu zadaným zpomalením až na minimální rychlost. Po dosažení minimální rychlosti je pohyb skokově ukončen.
Pokud je pohyb realizován bez ramp zrychlení/zpomalení pohybu, jsou první a třetí fáze vynechány a změna rychlosti pak probíhá skokově.
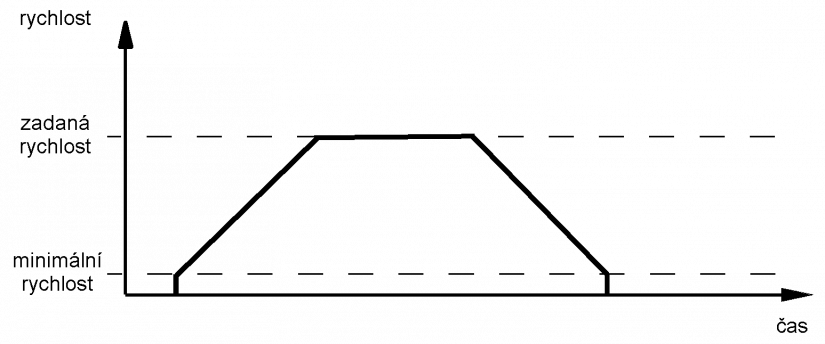
Obr. 3 Základní průběh rychlosti pohybu v čase
Pohyby jsou prováděny ve dvou režimech - rychlostním a polohovém. Rychlostní režim slouží pro pohyby zadanou rychlostí po nekonečné dráze. Je tedy určen především pro rotační osy. Polohový režim pak kromě rychlosti pohybu definuje i dráhu pohybu.
Režim pohybu je svázán s použitým příkazem. Příkazy 105 (trvalý pohyb zadanou rychlostí) a 108 (zastavení provozním zpomalením) provozují osu v rychlostním režimu. Ostatní pohybové příkazy provozují osu v režimu polohovém. Obě sady příkazů lze kombinovat a přecházet tak z jednoho režimu pohybu do druhého i za pohybu.
Rychlostní režim pohybu
Pokud chceme osu provozovat v rychlostním režimu, používáme k zadání pohybu příkaz 105 (trvalý pohyb zadanou rychlostí), který definuje pouze cílovou rychlost pohybu. Osa se rozjede na požadovanou rychlost a tuto rychlost udržuje až do okamžiku zadání nové rychlosti, nebo příkazu zastavení osy.
Dosažení zadané rychlosti je indikováno nastavením bitu INVEL v proměnné MCSTAT ve vstupní zóně na hodnotu 1. Pohyb osy je indikován nastavením bitu MOVE v proměnné MCSTAT na hodnotu 1. Po zastavení pohybu je bit MOVE vynulován. Aktuální směr pohybu je indikován bitem DIR v proměnné MCSTAT (0 kladný směr pohybu,1 záporný směr pohybu). Bit INVEL je nulován automaticky zápisem dalšího pohybového příkazu.
V rychlostním režimu lze měnit za pohybu rychlost i směr pohybu. Chování osy a indikace jejího stavu jsou zobrazeny na následujících obrázcích.
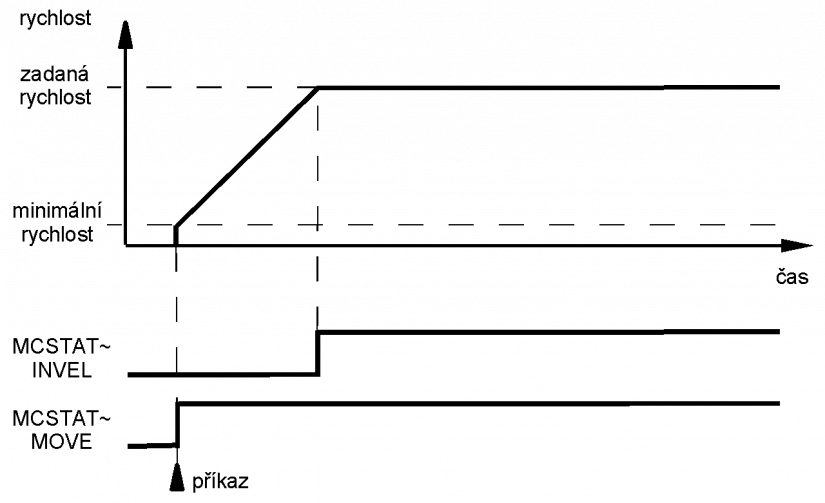
Obr. 4 Zahájení pohybu v rychlostním režimu
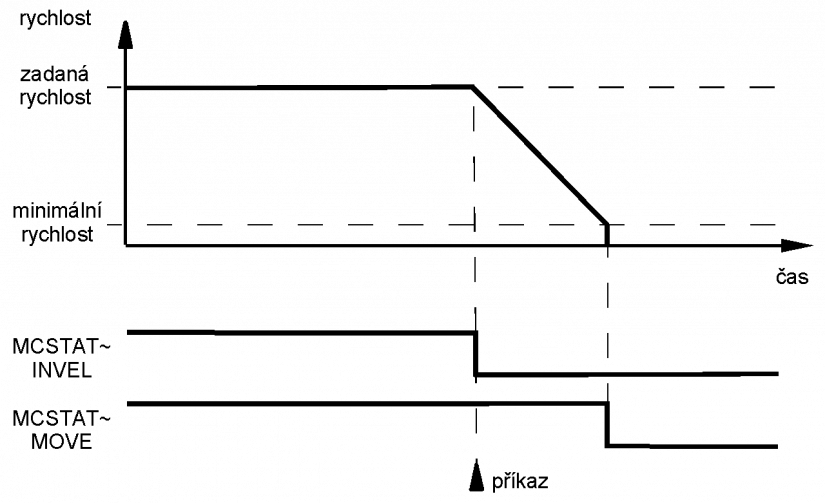
Obr. 5 Ukončení pohybu v rychlostním režimu
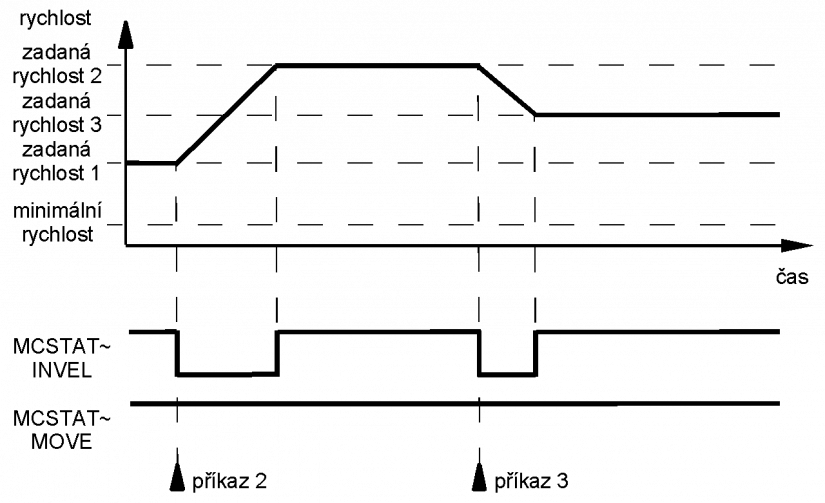
Obr. 6 Změna rychlosti pohybu při zachování směru v rychlostním režimu
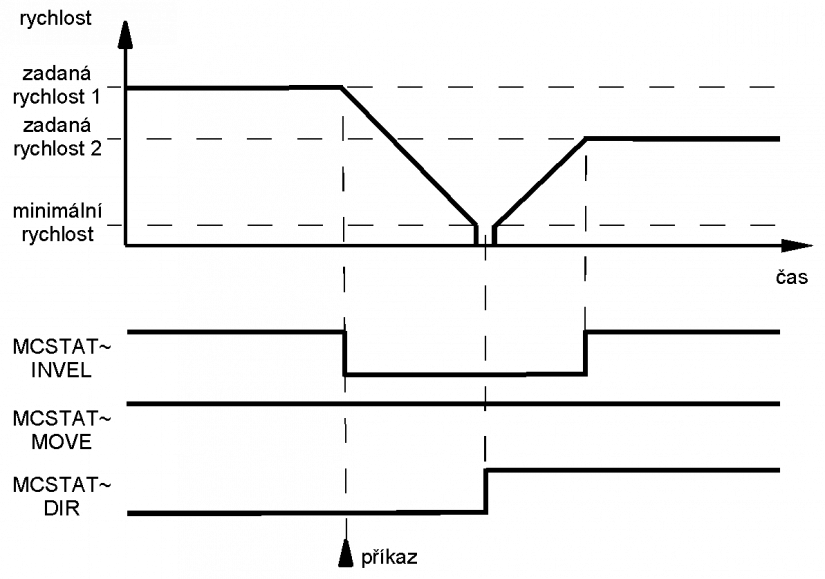
Obr. 7 Změna rychlosti pohybu při změně směru v rychlostním režimu
V rychlostním režimu pracuje i příkaz 108, který provede okamžité zastavení osy provozním zpomalením, bez ohledu na její aktuální nebo cílovou polohu.
Popis chování těchto příkazů je uveden v kapitole Pohybové příkazy dále.
Polohový režim pohybu
Ostatní pohybové příkazy slouží k provozu osy v polohovém režimu, kdy je kromě rychlosti pohybu zadána i dráha pohybu. Pohyb pak má výše popsané tři fáze a po dokončení fáze zpomalení zastaví přesně na cílové poloze (viz. násl. obrázek). To znamená, že se během celého pohybu vyšle přesně tolik pulzů, kolik bylo zadáno.
Dosažení cílové polohy je indikováno nastavením bitu TRG v proměnné MCSTAT ve vstupní zóně na hodnotu 1. Pohyb osy je indikován nastavením bitu MOVE v proměnné MCSTAT na hodnotu 1. Po zastavení pohybu je bit MOVE vynulován. Aktuální směr pohybu je indikován bitem DIR v proměnné MCSTAT (0 kladný směr pohybu, 1 záporný směr pohybu). Bit TRG je nulován automaticky zápisem dalšího pohybového příkazu.
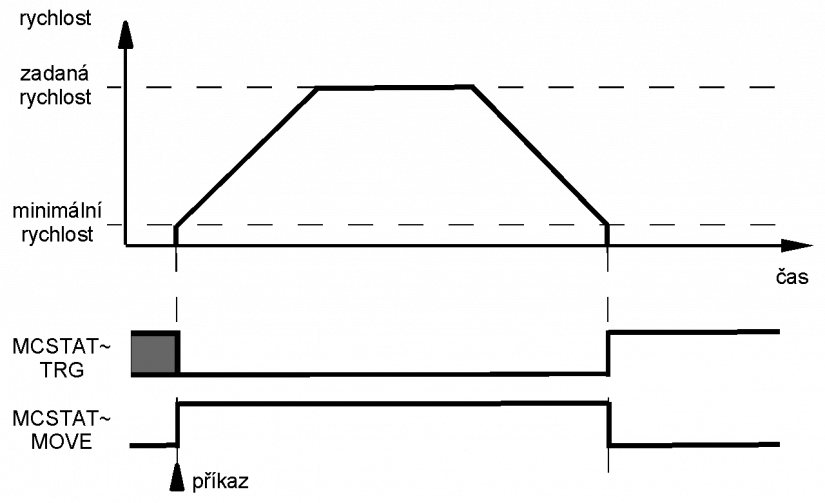
Obr. 8 Standardní průběh pohybu v polohovém režimu příkazy 101 nebo 102
Vzhledem k tomu, že je rychlost motoru určena frekvencí pulzů, není změna rychlosti zcela plynulá, na rozdíl od řízení napětím. Z toho důvodu může dojít k určité odchylce při výpočtu dráhy potřebné pro třetí fázi pohybu, tedy zpomalování. Tato odchylka může být v řádu jednotek pulzů.
V případě, že osa již dosáhne ve fázi zpomalení minimální rychlost a cílová poloha ještě není dosažena, je proveden dojezd na cílovou polohu minimální rychlostí. Pokud je cílová poloha dosažena před dosažením minimální rychlosti, je pohyb okamžitě ukončen.
Pokud zadáme příliš krátkou dráhu, osa musí začít zpomalovat dříve, než dosáhne zadané rychlosti. Takový pohyb pak nemá druhou fázi (rovnoměrný pohyb), ale přechází z fáze zrychlování přímo do fáze zpomalování (viz. násl. obrázek).
V polohovém režimu lze již zadané pohyby okamžitě měnit. K jejich definování nám slouží následující pohybové příkazy
101 - posun na cílovou polohu (dráha definována absolutní cílovou polohou)
102 - posun o zadanou vzdálenost (dráha definována relativním posunem)
Popis chování těchto příkazů je uveden v kapitole Pohybové příkazy dále.
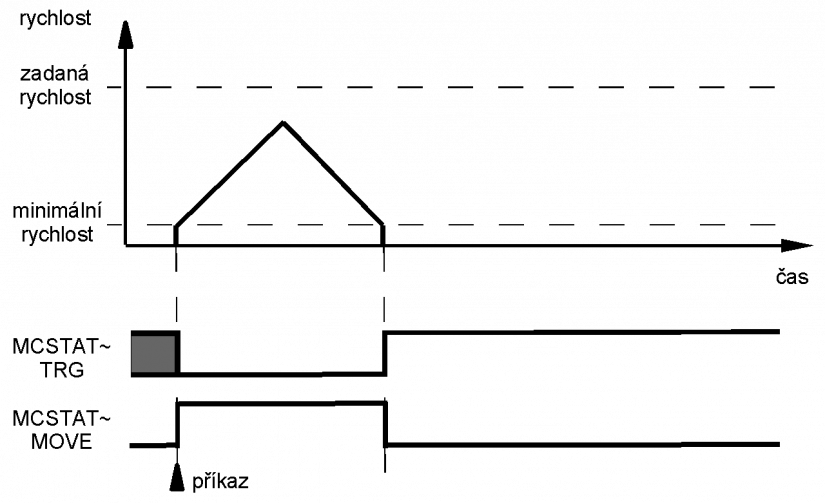
Obr. 9 Zkrácený průběh pohybu při zadání krátké dráhy příkazy 101 nebo 102
Jednoduchý polohový pohyb
Pokud je osa v klidu, pak zápisem příkazu 101 nebo 102 vyvoláme okamžité zahájení pohybu s parametry danými tímto příkazem. Chování osy a indikace jejího stavu jsou zobrazeny na předchozích dvou obrázcích.
Okamžitá změna polohového pohybu
Pokud je osa v pohybu, pak zápisem příkazu 101 nebo 102 vyvoláme okamžitou změnu pohybu s parametry danými tímto novým příkazem. Změny rychlosti probíhají podle zadaných provozních zrychlení a zpomalení.
Dosažení cílové polohy nového pohybu je indikováno nastavením bitu TRG v proměnné MCSTAT ve vstupní zóně na hodnotu 1. Pohyb osy je indikován nastavením bitu MOVE v proměnné MCSTAT na hodnotu 1. Po zastavení pohybu je bit MOVE vynulován. Aktuální směr pohybu je indikován bitem DIR v proměnné MCSTAT (0 kladný směr pohybu, 1 záporný směr pohybu).
Chování osy a indikace jejího stavu jsou zobrazeny na následujících dvou obrázcích.
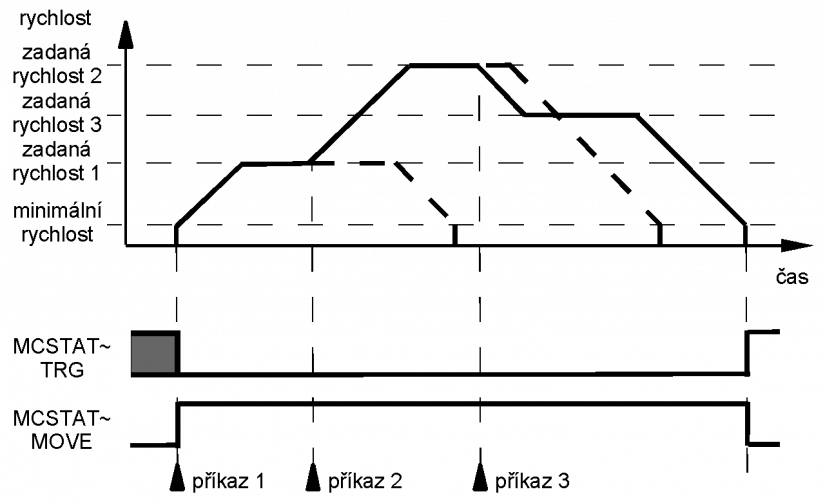
Obr. 10 Příklad dvojí změny aktuálního pohybu při zachování směru v polohovém režimu příkazy 101 nebo 102 (čárkovaně jsou znázorněny původně naplánované trajektorie)
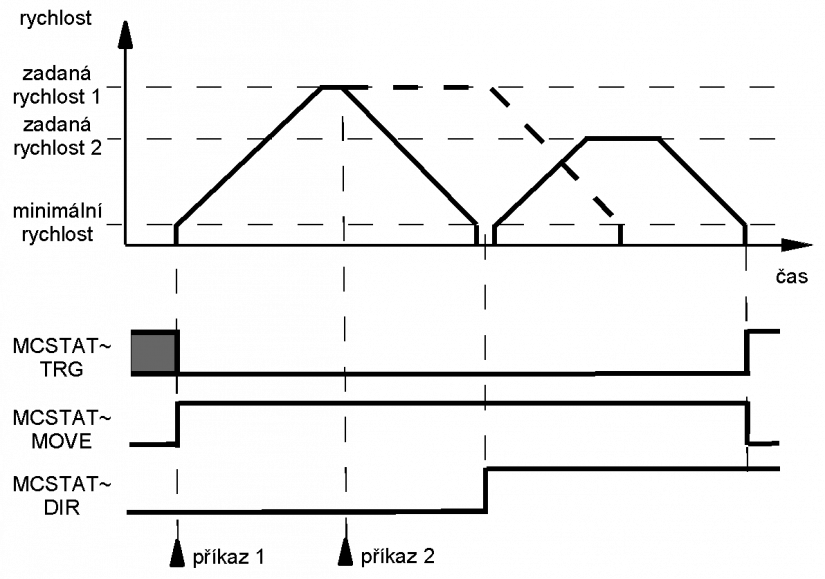
Obr. 11 Příklad změny aktuálního pohybu při změně směru v polohovém režimu příkazy 101 nebo 102 (čárkovaně je znázorněna původně naplánovaná trajektorie)